

DMTN-021
Implementation of Image Difference Decorrelation#
Abstract
Herein, we describe a method for decorrelating image differences produced by the Alard and Lupton [1998] method of PSF matching. Inspired by the recent work of Zackay et al. [2016] and the prior work of Kaiser [2004], this proposed method uses a single post-subtraction convolution of an image difference to remove the neighboring pixel covariances in the image difference that result from the convolution of the template image by the PSF matching kernel. We describe the method in detail, analyze its effects on image differences (both real and simulated) as well as on detections and photometry of detected sources in decorrelated image differences. We also compare the decorrelated image differences with those resulting from a basic implementation of Zackay et al. [2016]. We describe the implementation of the new correction in the LSST image differencing pipeline, and discuss potential issues and areas of future research.
1. Introduction#
Image subtraction analysis, also referred to as “difference image analysis”, or “DIA”, is the standard method for identifying and measuring transients and variables in astronomical images. In DIA, a science image is subtracted from a template image (hereafter, simply, “template”), in order to identify transients from either image. In the LSST stack [Rubin Observatory Science Pipelines Developers, 2025] (and most other existing transient detection pipelines), optimal image subtraction is enabled through point spread function (PSF) matching via the method of Alard and Lupton [1998] (hereafter A&L) (also, Alard [2000]). This procedure is used to estimate a convolution kernel which, when convolved with the template, matches the PSF of the template with that of the science image by minimizing the mean squared difference between the matched template and science image, given the assumption of no variability between the two. The A&L procedure uses linear basis functions, with potentially spatially-varying linear coefficients, to model the potentially spatially-varying matching kernel which can flexibly account for spatially-varying differences in PSFs between the two images, as well as a spatially-varying differential background. The algorithm has the advantage that it does not require direct measurement of the images’ PSFs. Instead it only needs to model the differential (potentially spatially-varying) matching kernel in order to obtain an optimal subtraction. Additionally it does not require performing a Fourier transform of the exposures; thus no issues arise with handling masked pixels and other artifacts.
Image subtraction using the A&L method produces an optimal difference image in the case of a noise-less template. However, when the template is noisy (e.g., when the template is comprised of a small number of co-adds), then its convolution with the matching kernel leads to significant covariance of noise among neighboring pixels within the resulting subtracted image, which will adversely affect accurate detection and measurement if not accounted for [Slater et al., 2016, Price and Magnier, 2019]. False detections in this case can be reduced by tracking the covariance matrix, or more ad-hoc, increasing the detection threshold (as is the current implementation, where detection is performed at 5.5-\(\sigma\) rather than the canonical 5.0-\(\sigma\)).
While LSST will, over its ten-year span, collect dozens of observations per field and passband [Ivezić et al., 2019], at the onset of the survey, this number will be small enough that this issue of noisy templates will be important. Moreover, if we intend to bin templates by airmass to account for differential chromatic refraction (DCR), then the total number of coadds contributing to each template will necessarily be smaller. Finally, depending upon the flavor of coadd [Bosch, 2025] used to construct the template, template noise and the resulting covariances in the image difference will be more or less of an issue as the survey progresses.
In this DMTN, we describe a proposal to decorrelate an A&L optimal image difference. We describe its implementation in the LSST stack, and show that it has the desired effects on the noise and covariance properties of simulated images. Finally, we perform a similar analysis on a set of DECam image differences, and show that this method has the desired effects on detection rates and properties in the image differences.
2. Proposal#
The goal of PSF matching via A&L is to estimate the kernel \(\kappa\) that best matches the PSF of the two images being subtracted, \(I_1\) and \(I_2\) (by minimizing their mean squared differences; typically \(I_2\) is the template image, which is convolved with \(\kappa\)). The image difference \(D\) is then \(D = I_1 - (\kappa \otimes I_2)\). More technically, A&L estimates the \(\kappa\) which minimizes the residuals in \(D\). As mentioned above, due to the convolution (\(\kappa \otimes I_2\)), the noise in \(D\) will be correlated. For a more complete derivation of the expressions shown below, please see Appendix II.
2.1. Difference image decorrelation.#
An algorithm developed by Kaiser [2004] and later rediscovered by Zackay and Ofek [2017] showed that the noise in a PSF-matched coadd image can be decorrelated via noise whitening (i.e. flattening the noise spectrum). The same principle may also be applied to image differencing [Zackay et al., 2016]. In the case of A&L PSF matching, this results in an image difference in Fourier space \(D(k)\):
Here, \(X(k)\) denotes the FFT of \(X\); \(\overline{\sigma}_i^2\) is the mean of the per-pixel variances of image \(I_i\) – i.e., \(\overline{\sigma}_i^2 = \frac{\sum_{x,y} \sigma_i^2(x,y)}{N_{x,y}}\). Thus, we may perform PSF matching to estimate \(\kappa\) by standard methods (e.g., A&L and related methods) and then correct for the noise in the template via (1). The term in the square-root of (1) is a post-subtraction convolution kernel, or decorrelation kernel \(\psi(k)\),
which is convolved with the image difference, and has the effect of decorrelating the noise in the image difference that was introduced by convolution of \(I_2\) with the A&L PSF matching kernel \(\kappa\). It also (explicitly) contains an extra factor of \(\sqrt{\overline{\sigma}_1^2+\overline{\sigma}_2^2}\), which sets the overall adjusted variance of the noise of the image difference (in contrast to the unit variance set by the algorithm proposed by Zackay et al. [2016].
2.2. Implementation details#
Since the current implementation of
A&L is performed
in (real) image space, we implement the image decorrelation in image
space as well. The post-subtraction convolution kernel \(\psi(k)\)
is computed in frequency space from \(\kappa(k)\),
\(\overline{\sigma}_1\), and \(\overline{\sigma}_2\),
(2), and is inverse Fourier-transformed to a kernel
\(\psi\) in real space. The image difference is then convolved with
\(\psi\) to obtain the decorrelated image difference,
\(D^\prime = \psi \otimes \big[ I_1 - (\kappa \otimes I_2) \big]\).
This allows us to circumvent FT-ing the two exposures \(I_1\) and
\(I_2\), which could lead to artifacts due to masked and/or bad
pixels. Finally, the resulting PSF \(\phi_D\) of \(D^\prime\),
important for detection and measurement of DIA sources, is simply
the convolution of the PSF of \(D\) (which equals the PSF
\(\phi_1\) of \(I_1\) by definition) with \(\psi\):
2.3. Comparison of diffim decorrelation and Zackay, et al. (2016).#
The decorrelation strategy described above is basically an “afterburner”
correction to the standard image differencing algorithm which has been
in wide use for over a decade. Thus it was relatively straightforward to
integrate directly into the LSST image differencing (ip_diffim)
pipeline. It maintains the advantages described previously that are
implicit to the
A&L algorithm:
the PSFs of \(I_1\) and \(I_2\) do not need to be measured, and
spatial variations in PSFs may be readily accounted for. The
decorrelation can be relatively inexpensive, as it requires one FFT of
\(\kappa\) and one inverse-FFT of \(\psi(k)\) (which are both
small, of order 1,000 pixels), followed by one convolution of the
difference image. Image masks are maintained, and the variance plane in
the decorrelated image difference is also adjusted to the correct
variance.
The decorrelation proposal has similarities to the image differencing method proposed by Zackay et al. [2016] (hereafter, simply ZOGY, which involves FFT-ing the two input images and their PSFs. It also does not require accurate measurements of PSFs of the two images, while ZOGY does, including any bulk astrometric offsets (which would be incorporated into the PSFs). ZOGY instead incorporates estimates for the misestimation of PSFs and astrometry in the resulting variance planes.
Of note, due to its effective utility of PSF cross-correlation, ZOGY is symmetric in \(I_1\) and \(I_2\) (e.g., it does not explicitly require \(I_1\) to have a broader PSF than \(I_2\)), whereas the standard A&L is not. Deconvolution of the template, or “pre-convolution” of the science image \(I_1\) are possible methods to address this concern with A&L, in the case where the PSF of \(I_1\) is at most \(\sim \sqrt{2}\times\) narrower than that of \(I_2\). In this case, we convolve \(I_1\) with a “pre-conditioning” kernel \(M\) (typically, equal to the PSF of \(I_1\)), and the decorrelated image difference is then:
with PSF
It was also claimed by the authors that ZOGY procedure produces cleaner image subtractions in cases of (1) perpendicular-oriented PSFs and (2) astrometric jitter. This claim has yet to be investigated thoroughly using the LSST A&L implementation, although the effective deconvolution required by A&L in situation (1) does often lead to noticeable artifacts.
3. Results#
3.1 Simulated image differences.#
We developed a simple reference implementation of A&L, and applied it to simulated images with point-sources with a variety of signal-to-noise, and different (elliptical) Gaussian PSFs and (constant) image variances. We included the capability to simulate spatial PSF variation, including spatially-varying astrometric offsets (which can be modeled by the A&L PSF matching kernel). An example input template and science image, as well as PSF-matched template and resulting diffim is shown in Fig. 1.
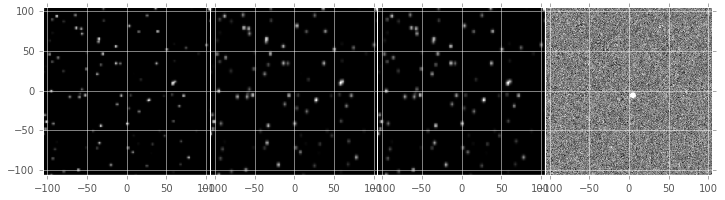
Fig. 1 From left to right, sample (simulated) template image, PSF-matched template, science image, and difference image. In this simulated example, the source near the center was set to increase in flux by 2% between the science and template images.#
In Fig. 2 and Fig. 3, we show the PSF matching kernel (\(\kappa\)) that was estimated for the images shown in Fig. 1, and the resulting decorrelation kernel, \(\psi\). We note that \(\psi\) largely has the structure of a delta function, with a small region of negative signal, thus its capability, when convolved with the difference image, to act effectively as a “sharpening” kernel.
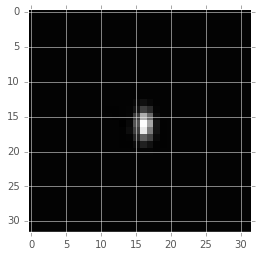
Fig. 2 Sample PSF matching kernel \(\kappa\) for the images shown in Fig. 1.#
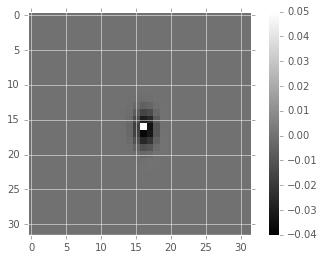
Fig. 3 Resulting decorrelation kernel \(\psi\) (right) for the images shown in Fig. 1.#
When we convolve \(\psi\) (Fig. 3) with the raw image difference (Fig. 1) panel), we obtain the decorrelated image, shown in the left-most panel of Fig. 4. The noise visually appears to be greater in the decorrelated image, and a closer look at the statistics reveals that this is indeed the case (Table 1, Fig. 5, Fig. 6, and Fig. 7). Fig. 5 shows that the variance of the decorrelated image has increased. Indeed, the measured variances (Table 1) reveal that the variance of the uncorrected image difference was lower than expected, while the decorrelation has increased the variance to the expected level:
Variance |
Covariance |
|
|---|---|---|
Corrected |
0.0778 |
0.300 |
Original |
0.0449 |
0.793 |
Expected |
0.0800 |
0.004 |
0.0790\(^*\) |
0.301 |
In addition, we see (Table 1, Fig. 6 and Fig. 7) that the covariances between neighboring pixels in the image difference has been significantly decreased following convolution with the decorrelation kernel. The covariance matrix has been significantly diagonalized. While the covariance of the decorrelated image might at first glance appear high relative to the random expectation, we show (below) that it is equal to the value obtained using a basic implementation of the ZOGY proper image subtraction procedure.
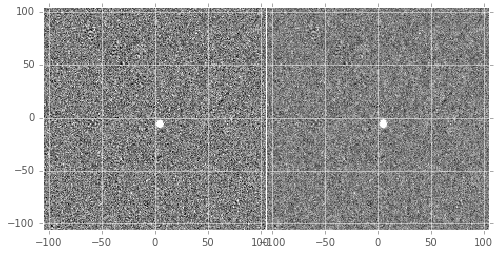
Fig. 4 On the left is the decorrelated image difference, \(D^\prime\). Original image difference \(D\) is shown here for comparison, in the right-most panel, with the same intensity scale, as well as in Fig. 1.#
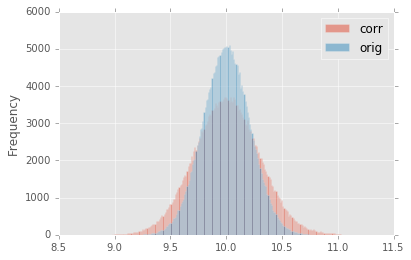
Fig. 5 Histogram of sigma-clipped pixels in the original image difference* \(D\) (blue; ‘orig’) and the decorrelated image difference \(D^\prime\) (red; ‘corr’) in Fig. 4.#
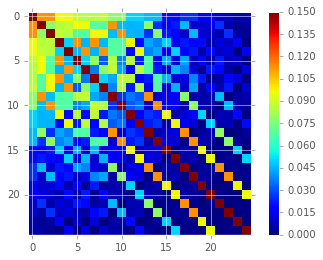
Fig. 6 Covariance between neighboring pixels in the original, uncorrected image difference \(D\) in Fig. 4.#
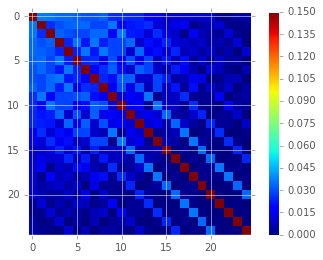
Fig. 7 Covariance between neighboring pixels in the decorrelated image difference \(D^\prime\) in Fig. 4.#
3.2. Comparison with ZOGY.#
We developed a basic implementation of the Zackay et al. [2016] proper image differencing procedure (ZOGY) in order to compare image differences (see Appendix III. for details).
As shown in Table 1, many of the bulk statistics between image differences derived via the two methods are (as expected) nearly identical. In fact, the two “optimal” image differences are nearly identical, as we show in Fig. 8. The variance of the difference between the two difference images is of the order of 0.05% of the variances of the individual images.
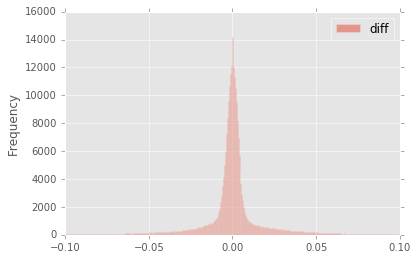
Fig. 8 Histogram of pixel-wise difference between optimal image differences. Each image difference has been rescaled to unit variance to facilitate differencing.#
3.3. Application to real data.#
We have implemented and tested the proposed decorrelation method in the
LSST software stack as a new lsst.pipe.base.Task subclass called
lsst.ip.diffim.DecorrelateALKernelTask, and applied it to real data
obtained from DECam. For this image differencing experiment, we used the
standard A&L
procedure with a spatially-varying PSF matching kernel (default
configuration parameters). The decorrelation computation may be turned
on by setting the option doDecorrelation=True for the
imageDifference.py command-line task. In Fig. 9 we
show sub-images of two astrometrically aligned input exposures, the
PSF-matched template image, and the decorrelated image difference.
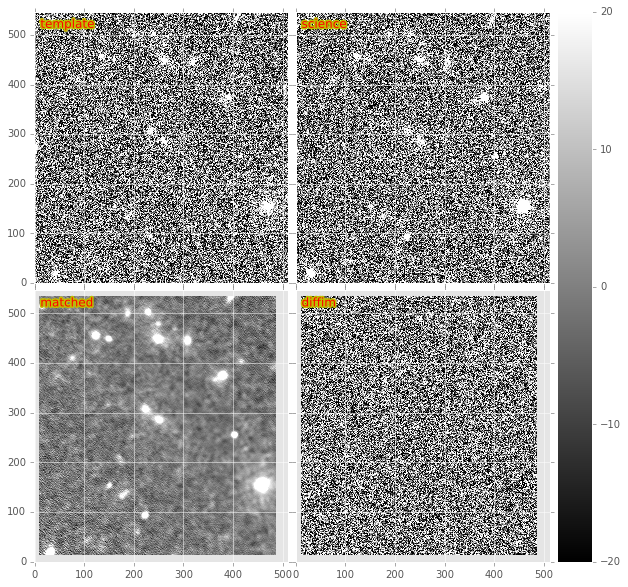
Fig. 9 Image differencing on real (DECam) data. Sub-images of the two input exposures (top; template has been astrometrically aligned with the science image), the PSF-matched template (bottom-left), and the decorrelated image difference (bottom-right).#
DecorrelateALKernelTask simply extracts the
A&L PSF matching
kernel \(\kappa\) estimated previously by
lsst.ip.diffim.ImagePsfMatchTask.subtractExposures() for the center
of the image, and estimates a constant image variance
\(\overline{\sigma}_1^2\) and \(\overline{\sigma}_2^2\) for each
image (sigma-clipped mean of its variance plane; in this example 62.8
and 60.0 for the science and template images, respectively). The task
then computes the decorrelation kernel \(\psi\) from those three
quantities (Fig. 10 and Fig. 11). As expected, the resulting
decorrelated image difference has a greater variance than the
“uncorrected” image difference (120.8 vs. 66.8), and a value close to
the naive expected variance \(60.0+62.8=122.8\). Additionally, we
show in Fig. 12 that the decorrelated DECam image
indeed has a lower neighboring-pixel covariance (6.0% off-diagonal
covariance, vs. 35% for the uncorrected diffim).
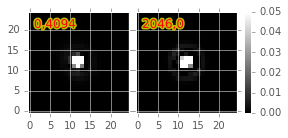
Fig. 10 Image differencing on real (DECam) data. PSF matching kernels Shown are kernels derived from two corners of the image which showed the greatest variation in the matching kernels (pixel coordinates overlaid).#
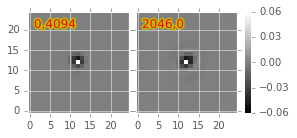
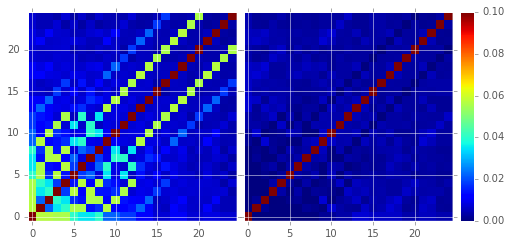
Fig. 12 Image differencing on real (DECam) data. Neighboring pixel covariance matrices for uncorrected (left) and corrected (right) image difference.#
3.4. Effects of diffim decorrelation on detection and measurement#
See this notebook.
The higher variance of the decorrelated image difference results in a
smaller number of DIA source detections (\(\sim\) 70% fewer) at
the same default (5.5-\(\sigma\)) detection threshold (Table 2).
Notably, if we decrease the detection threshold to the
desired 5.0-\(\sigma\) level, the detection count in the
decorrelated image difference does not increase substantially
(\(\sim 14\%\)). However, the number of detections does increase
dramatically (\(\sim 176\%\)) for the uncorrected image difference
if we were to switch to a 5.0-\(\sigma\) detection threshold.
(This is why the default DIA source detection threshold has
previously been set in the LSST stack to 5.5-\(\sigma\)).
Decorrelated? |
Detection threshold |
Positive detected |
Negative detected |
Merged detected |
|---|---|---|---|---|
Yes |
5.0 |
43 |
18 |
50 |
Yes |
5.5 |
35 |
15 |
41 |
No |
5.0 |
89 |
328 |
395 |
No |
5.5 |
58 |
98 |
143 |
We matched the catalogs of detections between the uncorrected
(“undecorrelated”) and decorrelated image differences (to within
\(5^{\prime\prime}\)), and found that 45 of the 47 DIA sources
detected in the decorrelated image are also detected in the uncorrected
image difference. We compared the aperture photometry of the 45 matched
DIA sources in the two catalogs (using the
base_CircularApertureFlux_50_0_flux measurement) using a linear
regression to quantify any differential offset and scaling. (We did not
filter to remove dipoles, as the DipoleClassification task is still
a work in progress and doing so would remove a large number of
DIA sources. We found that there is no significant photometric
offset between measurements in the two images, while the flux
measurement is \(\sim 4.5 \pm 0.5\%\) lower in the decorrelated
image. Unsurprisingly, the quantified errors in the flux measurements
(base_CircularApertureFlux_50_0_fluxSigma) are
\(\sim 120 \pm 5\%\) greater in the decorrelated image.
For a more thorough analysis, we recapitulated some of the work of Slater et al. [2016], which described the issue with per-pixel covariance in A&L image differences generated by the LSST stack and the resulting issues with detection and measurement, but this time using the decorrelated image differences. With the help of Dr. Slater, we performed exactly his analysis on the same set of DECam images as described in Slater et al. [2016]. In Fig. 13 below, we present an updated version of Figure 6 from Slater, et al. (2016) after decorrelation has been performed. We also present in Fig. 14 and Fig. 15 a version of Figure 7 from Slater, et al. (2016). Our analysis shows that the detections in the decorrelated image difference are now nicely tracking just at or above the \(5\sigma\) threshold.
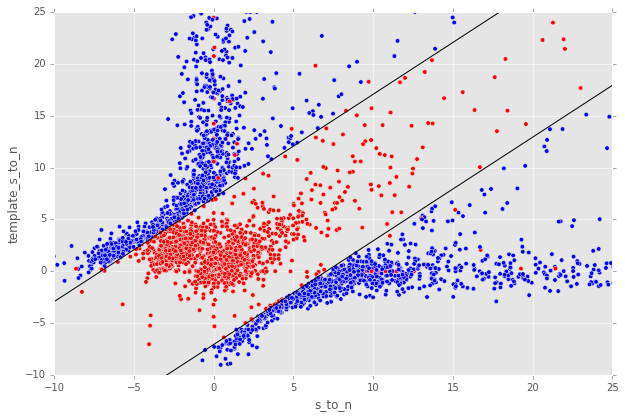
Fig. 13 As in Figure 6 from Slater, et al. (2016): PSF photometry in the template and science exposures, forced on the positions of DIA source detections in the image difference following image difference decorrelation. The parallel diagonal lines denote science−template* \(>5\sqrt{2}\sigma\) and science−template \(< 5\sqrt{2}\sigma\), which are the intended criteria for detection. The numerous detections just at or below these detection thresholds have been eliminated, and (ignoring the two clouds of detections near (0, 0) and (-2.5, 2.5)) the primary detections are above (or below) the detection thresholds. Sources have not been filtered to remove false detections (e.g., dipoles).#
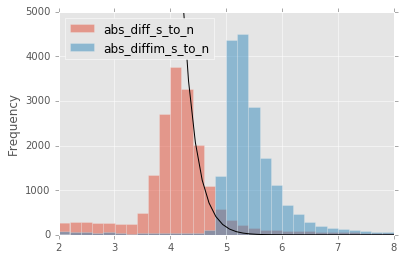
Fig. 14 As in Figure 7 from Slater, et al. (2016): Comparison of force photometry SNR (red) versus the SNR in image difference (blue) for all sources in a single DECam exposure. The black line shows the expected detection counts from random noise [Slater et al., 2016]. Shown here for uncorrected image difference (identical to Slater, et al. (2016)).#
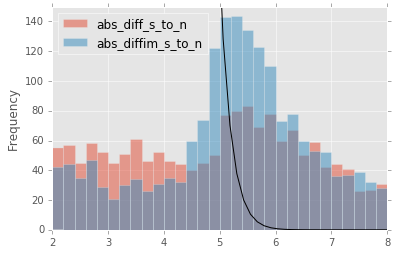
Fig. 15 Same as Fig. 14, but for sources detected at* 5-\(\sigma\) *in the decorrelated image difference.#
4. Conclusions and future work#
We have shown that performing image difference decorrelation as an “afterburner” post-processing step to A&L image differences generated by the LSST stack is an effective method to eliminate most issues arising from the resulting per-pixel covariance in said images. We also showed that the resulting decorrelated image differences have similar statistical and noise properties, even in the case of a noisy template, to those generated using the “proper image subtraction” method recently proposed by Zackay et al. [2016].
There still exist several outstanding issues or questions related to details of the decorrelation procedure as it is currently implemented in the LSST stack. We now describe several of those.
4.1. Accounting for spatial variations in noise (variance) and matching kernel#
There will be spatial variations across an image of the PSF matching kernel and the template- and science-image per-pixel variances (an example of the kernel variation is shown in Fig. 10 and Fig. 11). These three parameters separately will contribute to spatial variations in the decorrelation kernel \(\psi\), with unknown resulting second-order effects on the resulting decorrelated image. If these parameters are computed just for the center of the images (as they are, currently), then the resulting \(\psi\) is only accurate for the center of the image, and could lead to over/under-correction of the correlated noise nearer to the edges of the image difference. Another effect is that the resulting adjusted image difference PSF will also not include the accurate spatial variations.
We explored the effect of spatial variations in all three of these parameters for a single example DECam CCD image subtraction. The PSF matching kernel for this image varies across the image (Fig. 10 and Fig. 10), and thus so does the resulting decorrelation kernel, \(\psi\). Additionally, the noise (quantified in the variance planes of the two exposures) varies across both the template and science images by \(\sim 1\%\) (data not shown here, but see this IPython notebook). We computed decorrelation kernels \(\psi_i\) for the observed extremes of each of these three parameters, and compared the resulting decorrelated image differences to the canonical decorrelated image difference derived using \(\psi\) computed for the center of the images. The distribution of variances (sigma-clipped means of the variance plane) of the resulting decorrelated image differences differed by as much as \(\sim 5.6\%\) at the extreme (\(\sim 1.3\%\) standard deviation). The per-pixel covariance in the resulting images varied by as much as \(\sim 50\%\) (between \(4.0\) and \(8.0\%\)) at the extreme (\(\sim 25\%\) standard deviation) but all represented significant reductions from \(34.9\%\) in the uncorrected image difference. Finally, the number of detections on the image differences varied by \(10\%\) at the extremes (\(2.2\%\) standard deviation) around \(\sim 50\) detections total. We have yet to investigate DIA source measurement, which could be affected by the assumption of a constant PSF across the image difference.
We have not determined whether this uncertainty in image difference statistics arising from using a single (constant) decorrelation kernel and constant image variances for diffim decorrelation will have a significant effect on LSST alert generation. It is clearly at most a second-order effect, with measurable uncertainties of order a few percent at most. If this uncertainty is deemed to high, then we will need to investigate computing \(\psi\) on a grid across the image, and (ideally) perform an interpolation to estimate a spatially-varying \(\psi(x,y)\).
4.2. DIA Source measurement#
The measurement and classification of dipoles in image differences, described in Reiss [2016] is complicated by image difference decorrelation, because dipole fitting is constrained using signal from the “pre-subtraction” template and science images, as well as the difference image. The prior assumption (for uncorrected image differences) has been that the PSF of the difference image is identical to those of the science and pre-PSF-matched template images, and thus the science image \(I_1\) could be reconstructed from the difference image \(D\) plus the PSF-matched template image \((\kappa \otimes I_2)\):
The decorrelation process modifies the PSF of the image difference such
that this equivalency no longer holds, and the PSFs of the three images
are now different. We will need to update the DipoleFitTask to
accurately model dipoles across the three images. However now that the
noise is accurately represented in the variance plane of the
decorrelated image difference, dipole measurement should be more
accurate and covariances will not be a concern.
5. Appendix#
5.A. Appendix I. Technical considerations.#
A complication arises in deriving the decorrelation kernel, in that the kernel starts-off with odd-sized pixel dimensions, but must be even-sized for FFT. Then once it is inverse-FFT-ed, it must be re-shaped to odd-sized again for convolution. This must be done with care to avoid small shifts in the pixels of the resulting decorrelated image difference.
Should we use the original (unwarped) template to compute the variance \(\sigma_2\) that enters into the computation of the decorrelation kernel, or should we use the warped template? The current implementation uses the warped template. This should not matter so long as we know that the variance plane gets handled correctly by the warping procedure.
5.B. Appendix II. Derivation#
Starting with the A&L expression,
where \(I_1\) is the science image with PSF \(\phi_1\). The model is that the true sky scene \(D\) is convolved with \(\phi_1\), so if we assume Gaussian, heteroschedastic noise (sky noise-limited), take a Fourier Transform, and compute the log-likelihood, we obtain
Then the MLE for \(D(k)\) is
with noise having variance
The variance diverges at large \(k\) as \(\phi_1^2(k)\) approaches zero, but (as shown by Kaiser [2004] and Zackay et al. [2016]) we can flatten the noise spectrum (“whiten the noise”) to obtain the expression in (1), which we will repeat here:
To compare this calculation to the ZOGY expression, we take the ZOGY assumption that \(\phi_1\) and \(\phi_2\) are known, and thus \(\kappa(k)=\phi_1(k)/\phi_2(k)\). Substituting this into (1) gives us:
which is identical to Equation (13) in Zackay et al. [2016], (3) below, except for an additional factor \(\sqrt{\overline{\sigma}_1^2 + \overline{\sigma}_2^2}\).
5.C. Appendix III. Implementation of basic ZOGY algorithm.#
We applied the basic Zackay et al. [2016] procedure only to a set of small, simulated images. Our implementation simply applies Equation (14) of their manuscript to the two simulated reference (\(R\)) and “new” (\(N\)) images, providing their (known) PSFs \(P_r\), \(P_n\) and variances \(\sigma_r^2\), \(\sigma_n^2\) to derive the proper difference image \(D\):
Here, \(F_r\) and \(F_n\) are the images’ flux-based zero-points (which we will set to one here), and \(\widehat{D}\) denotes the FT of \(D\). This expression is in Fourier space, and we inverse-FFT the image difference \(\widehat{D}\) to obtain the final image \(D\).
def performZackay(R, N, P_r, P_n, sig1, sig2):
from scipy.fftpack import fft2, ifft2, ifftshift
F_r = F_n = 1. # Don't worry about flux scaling here.
P_r_hat = fft2(P_r)
P_n_hat = fft2(P_n)
d_hat_numerator = (F_r * P_r_hat * fft2(N) - F_n * P_n_hat * fft2(R))
d_hat_denom = np.sqrt((sig1**2 * F_r**2 * np.abs(P_r_hat)**2) + (sig2**2 * F_n**2 * np.abs(P_n_hat)**2))
d_hat = d_hat_numerator / d_hat_denom
d = ifft2(d_hat)
D = ifftshift(d.real)
return D
We note that we can also perform the operation in a way that allows us to avoid FT-ing the images directly. This involves computing two convolution kernels in \(k\)-space, convolving each of the two images, and then subtracting. If we define two convolution kernels \(\zeta\) and \(\eta\) such that:
then we can iFFT \(\widehat{\zeta}\) and \(\widehat{\eta}\) and compute
We have performed this calculation and we obtain identical image differences to those computed using (4), above.
5.D. Appendix IV. Notebooks and code#
All figures in this document were generated using IPython notebooks and associated code in the diffimTests github repository, in particular, notebooks numbered 14, 13, 17, 19, and 20.
The decorrelation procedure described in this technote are implemented
in the ip_diffim and pipe_tasks LSST Github repos.
6. Acknowledgements#
We would like to thank C. Slater for re-running his DECam image analysis scripts using the new decorrelation code in the stack.
References#
James F. Bosch. Flavors of Coadds. Data Management Technical Note DMTN-015, NSF-DOE Vera C. Rubin Observatory, August 2025. URL: https://dmtn-015.lsst.io/, doi:10.71929/rubin/2583432.
N. Kaiser. Addition of images with varying seeing. 2004. Pan-STARRS Document Control, PSDC-002-011-xx. URL: http://spider.ipac.caltech.edu/staff/fmasci/home/astro_refs/PanStars_Coadder.pdf.
David Reiss. Dipole characterization for image differencing. Data Management Technical Note DMTN-007, NSF-DOE Vera C. Rubin Observatory, April 2016. URL: https://dmtn-007.lsst.io/.
Colin Slater, Mario Jurić, Željko Ivezić, and Lynne Jones. False Positive Rates in the LSST Image Differencing Pipeline. Data Management Technical Note DMTN-006, NSF-DOE Vera C. Rubin Observatory, March 2016. URL: https://dmtn-006.lsst.io/.
C. Alard. Image subtraction using a space-varying kernel. A&AS, 144:363–370, June 2000. doi:10.1051/aas:2000214.
C. Alard and Robert H. Lupton. A Method for Optimal Image Subtraction. ApJ, 503(1):325–331, August 1998. arXiv:astro-ph/9712287, doi:10.1086/305984.
Željko Ivezić, Steven M. Kahn, J. Anthony Tyson, and others. LSST: From Science Drivers to Reference Design and Anticipated Data Products. ApJ, 873(2):111, March 2019. arXiv:0805.2366, doi:10.3847/1538-4357/ab042c.
Paul A. Price and Eugene A. Magnier. Pan-STARRS PSF-Matching for Subtraction and Stacking. arXiv e-prints, pages arXiv:1901.09999, January 2019. arXiv:1901.09999, doi:10.48550/arXiv.1901.09999.
Rubin Observatory Science Pipelines Developers. The LSST Science Pipelines Software: Optical Survey Pipeline Reduction and Analysis Environment. Project Science Technical Note PSTN-019, NSF-DOE Vera C. Rubin Observatory, August 2025. URL: https://pstn-019.lsst.io/, doi:10.71929/rubin/2570545.
Barak Zackay and Eran O. Ofek. How to COAAD Images. II. A Coaddition Image that is Optimal for Any Purpose in the Background-dominated Noise Limit. ApJ, 836(2):188, February 2017. arXiv:1512.06879, doi:10.3847/1538-4357/836/2/188.